|
|
Seamus incorporated many electrical components into his design. It includes:
- 3 H-Bridges used to power DC motors - A relay circuit used to power the scissor lift - 6 reflectance sensors and 2 IR phototransistors - 2 10kHz band pass filter circuits which also amplified the signal and converted its amplitude to an analog voltage - A total of 5 DC motors - 6 mechanical switches - The TINAH board, a breakout board from an Arduino Mega |
Wire Routing
|
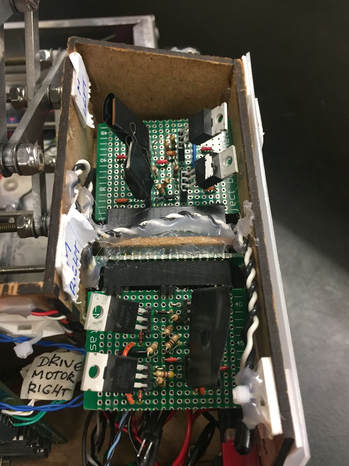
We strived to make our electrical design as modular as possible. We constructed header pin connectors for our PCBs so that they could be interchanged quickly if they malfunctioned.
We also ensured that the robot could be disassembled into its major mechanical components without removing any wiring. This was accomplished through the use of header pins at each mechanical divide. This process proved to be time consuming at first, but saved us a lot of time during later iterations of our design. |
|
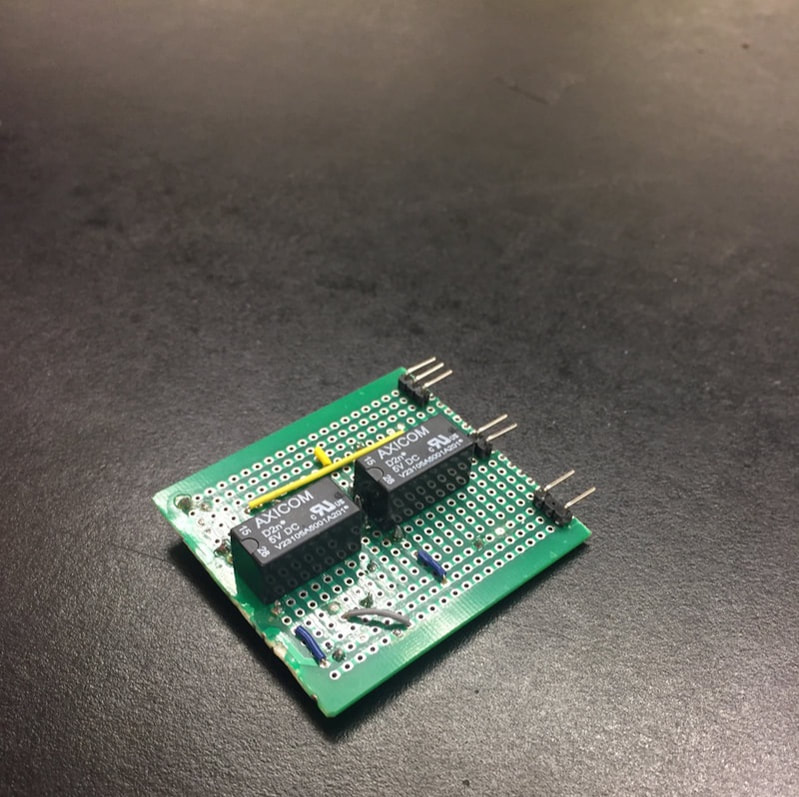
In order to get enough power to allow Seamus to lift himself up to the Zipline, we discovered that we needed 30 V. Further, because we needed negative 8V for our filter, the 30 V would come in the form of -8 to +24 V, creating the task of making a reliable H-Bridge more difficult.
Instead of designing and building a likely unreliable H-Bridge, we devised this circuit to the right. It uses two double pole double throw relays and 2 digital outs on our micro controller to control the scissor lift. One digital out controls direction, and the other turns it on and off. This circuit proved to be incredibly robust and never failed us, saving us potentially hours. Thank you alternative H-Bridge. |
|
