Seamus was designed with several ambitious mechanical components. These features set Seamus aside from other robots, and allows him to approach the challenge from a completely different angle.
The utilization of a scissor lift and net mechanism allowed Seamus to fish agents out of the water. Seamus does not rely on the agents remaining on the platforms as many other robots do.
You can take a look at a CAD version of Seamus on OnShape.
Seamus' mechanical design is broken down below, where you can explore the decisions and challenges that we faced in building him.
The utilization of a scissor lift and net mechanism allowed Seamus to fish agents out of the water. Seamus does not rely on the agents remaining on the platforms as many other robots do.
You can take a look at a CAD version of Seamus on OnShape.
Seamus' mechanical design is broken down below, where you can explore the decisions and challenges that we faced in building him.
Chassis
|
|
We chose to construct our chassis out of sheet metal, which was a very unpopular choice among our classmates. Most people chose hardboard (a wood composite) as it is much easier to prototype and iterate with.
We put in the legwork before manufacturing of reviewing and iterating our design so that we only had to build it once. It was beneficial to rebuild as few times as possible because it allowed us to design parts that are not easily disassembled such as U-Channel beams and motor brackets. We utilized strategic flanges on the sheet metal to increase stiffness. We bolted 2 U channels to the sheet metal frame to create a stable base for mounting and to greatly increase the torsional rigidity. Overall, the robustness of our chassis allowed us to engineer other components without worrying about having a solid base, allowing us more freedom in future design choices. |
Scissor Lift
|
|
In order to send our full robot down the zip-line, we knew we needed a mechanism that would deliver the needed extension of 36 cm and that would be able to hold and retract the entire weight of our robot. With this in mind, we began designing and doing the necessary calculations for a scissor lift.
We decided on a four stage scissor lift with sixteen 10 cm linkages. The top and bottom bases were water jet cut from aluminum sheet metal while the linkages were water jet cut from 0.25" aluminum. Originally, the scissor lift would be actuated via screw drive, however when tested, it took approximately 30 seconds for full extension. With the competition relying heavily on time, we redesigned a rack and pinion system to raise and lower the scissor lift. With this system driven by a 150:1, 27.5 V DC motor, the scissor lift was able to reach full height in 3 seconds. Furthermore, our actuator system had enough torque and power to fully lift our robot when in contact with the zip-line. Our scissor lift was the main attraction on our robot. Many ENPH 253 students and professors were always amazed by it's function and durability. Many teams in the past had tried and failed at building a reliable scissor lift, but we were eager and determined to prove it can be done. |
Arm
|
|
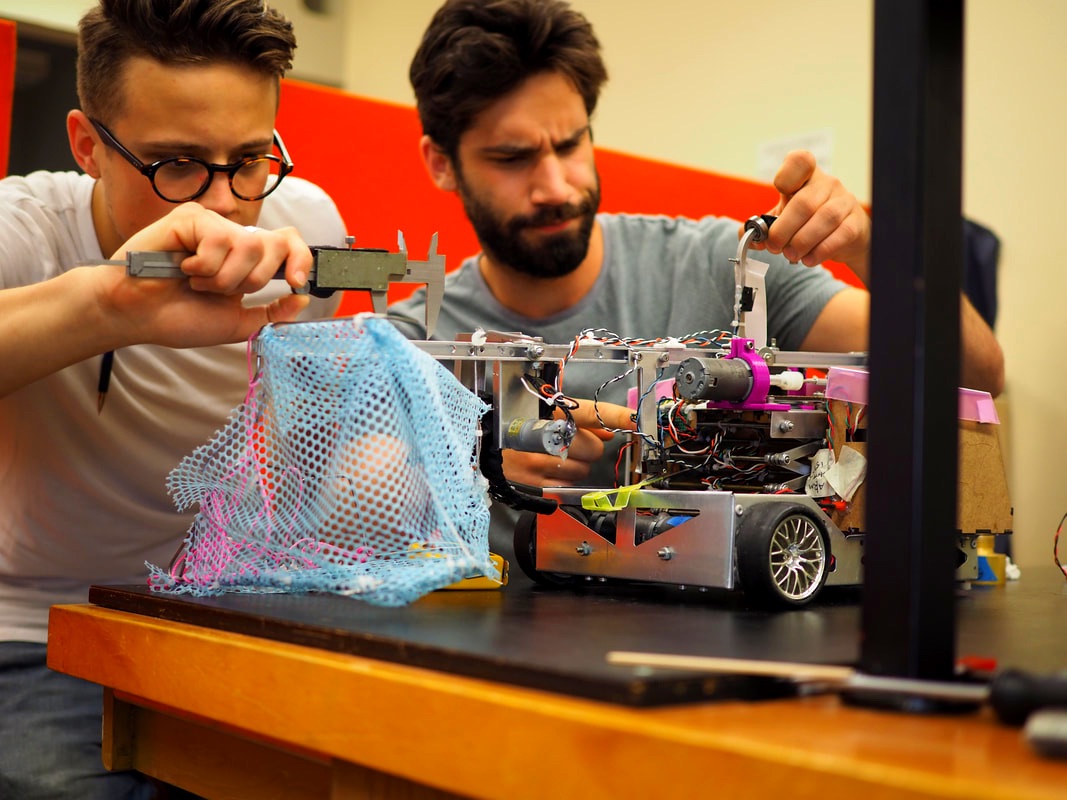
The biggest difference between Seamus and the rest of the field was our unique retrieval system. Rather than use a claw system like most of our classmates' robots, we chose to use a net. By using a net we didn't have to worry about agents falling in the water as we planned to retrieve all agents from the water anyways. The net went through several iterations and modifications since it needed to hold all the agents while ensuring none drifted or fell out.
The base for our arm was a 2ft long aluminum U-channel beam, This was chosen for its strength, light weight and easy mounting ability. it was attached to the scissor lift via a lazy-susan bearing and actuated by a worm and worm gear. The worm gear was chosen to lock the arm in place as it felt significant force against the water while Seamus moved around the tank. Attached mid way along the arm is our car wash mechanism. Inspired by the spinning brushes of a car wash, it was used to encourage the agents off the platforms and towards the net by continuously spinning. the rubber flaps where able to bend when encountering a platform and therefore not get stuck when traversing around the bucket. |
Drivetrain
|
|
Unlike most other robots, which used direct drive from the motors, Seamus had a custom drivetrain. His drivetrain included 3D-printed brackets, machined bushings and axels, as well as waterjet cut gears.
Due to Seamus' heavy stature, we knew we would need to gear the motors in order for Seamus to traverse the course. However, we wanted to maintain flexibility in this ratio, as it was important that he complete the course as fast as possible. For this reason the motors were mounted in slots so that they could be moved to accommodate different gear ratios. |
